Anwendungen:
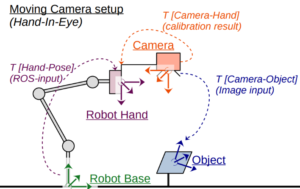
Der Befehl 3D-Roboterkalibrierung ermöglicht das Erfassen von Objektpositionen in Punktwolken auch wenn diese von einer sich bewegenden Kamera erfasst wurde. Zum Beispiel bei einer Bin-Picking Anwendung wo die Kamera am Roboterarm befestigt ist.
Funktionen:
Der Befehl wandelt die Punktwolken von einem Kamerakoordinatensystem in das Roboterkoordinatensystem um. Anschließend können alle in der Punktwolke gefundenen Positionen und Drehungen zur Roboterpositionierung verwendet werden.
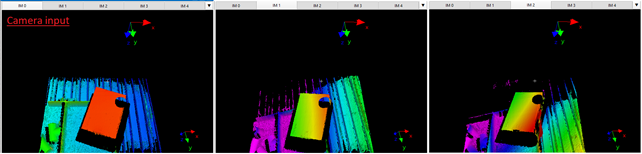
Zur Veranschaulichung wurde das folgende Objekt aus mehreren verschiedenen Positionen der Roboterhand aufgenommen:
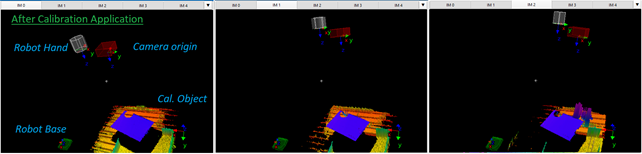
Nachdem der Befehl 3D-Roboterkalibrierung auf alle drei Punktwolken-Bilder angewendet wurde, sehen diese Punktwolken gleich aus, da sie in Roboterbasiskoordinaten übertragen wurden.
Ein vollständiges Beispiel, einschließlich der anfänglichen Erstellung einer Kalibrierung sowie der Anwendung finden Sie hier.