

Palettieren und Depalettieren mit Robotern und Bildverarbeitung ist ein fortschrittlicher Automatisierungsansatz, der häufig in der Industrie eingesetzt wird, um Effizienz, Geschwindigkeit und Präzision zu maximieren. Dabei übernehmen Roboterarme das Stapeln (Palettieren) und Entstapeln (Depalettieren) von Waren (z.B. Kartons, Beutel, Säcke, Behälter), während Bildverarbeitungssysteme (Kameras und Sensoren) eine präzise Steuerung und Kontrolle dieser Vorgänge ermöglichen.
Die größten Vorteile sind:
- Schnelligkeit: Roboter können eine Vielzahl von Objekten schnell bewegen und exakt stapeln.
- Flexibilität: Unterschiedliche Produkte und Formen können verarbeitet werden, indem der Roboter so programmiert wird, dass er unterschiedliche Palettiermuster verwendet.
- Dynamische Anpassungsfähigkeit: Wenn sich Objekte verschieben oder unregelmäßig angeordnet sind, kann der Roboter durch die Bildverarbeitungssoftware seine Greifstrategie dynamisch anpassen.
- Wiederholgenauigkeit: Roboter bieten präzise, wiederholbare Bewegungen, was zu einer hohen Packungsqualität und Stabilität der gestapelten Güter führt.
Technologien für Palettieren und Depalettieren
Die Basis für das korrekte Greifen ist die Hand-Eye-Kalibrierung, damit der Roboter an der Position greift, wo die Kamera das Objekt sieht. Damit das Erkennen zuverlässig und sicher funktioniert, ist eine sichere Erkennung der Objekte notwendig.
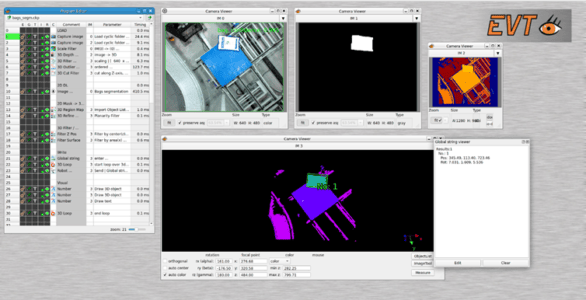
- EyeVision 3D: Tiefenkameras und Laser-basierte Systeme integriert mit der EyeVision Software geben präzise Informationen über die Position und Größe der Objekte, um den Roboter bei der Bewegung zu unterstützen.
- KI & Deep learning : Die Grundlage ist die neue Erkennung basieren auf Deep Learning. Sobald die Objekte mittels Deep Learning erkannt wurden, werden die Greifpositionen und Winkel im 3D Bild bestimmt. Durch die Punktewolke wird dann ermittelt, welches der Objekte an oberster Stelle liegt und das Depalettieren beginnt. Die in der EyeVision vordefinierten neuronalen Netze erlauben dieses Vorgehe für eine Vielzahl an Objekten. Sollte ein Objekt noch nicht bekannt sein, kann es mit dem integrierten Lerntool schnell Zeit eingelernt werden, sodass auch diese Objekte sicher erkannt werden.
Anwendungsbereiche
- Logistik und Lagerwesen: Roboter, die Palettieren und Depalettieren, finden weite Anwendung in Lagern und Distributionszentren, um den Materialfluss zu automatisieren.
- Lebensmittelindustrie: Hier wird besonders auf Geschwindigkeit und Hygiene geachtet, da viele Waren (wie verpackte Lebensmittel) in Massen bewegt werden müssen.
- Pharmaindustrie: Depalettierung von Medikamenten oder empfindlichen Produkten erfolgt hier besonders präzise, um Schäden zu vermeiden.