

Palletizing and depalletizing with robots and vision is an advanced automation approach that is often used in industry to maximize efficiency, speed and precision. Robotic arms perform the stacking (palletizing) and de-stacking (depalletizing) of goods (e.g. cartons, bags, sacks, containers), while vision systems (cameras and sensors) enable precise control and monitoring of these operations.
The main advantages are
- Speed: Robots can move a variety of objects quickly and stack them accurately.
- Flexibility: Different products and shapes can be handled by programming the robot to use different palletizing patterns.
- Dynamic adaptability: If objects shift or are arranged irregularly, the robot can dynamically adapt its gripping strategy through the vision software.
- Repeatability: Robots provide precise, repeatable movements, resulting in high pack quality and stability of stacked goods.
Technologies for palletizing and depalletizing
The basis for correct gripping is hand-eye calibration, so that the robot grips at the position where the camera sees the object. Reliable and safe object recognition is essential for this to work reliably and safely.
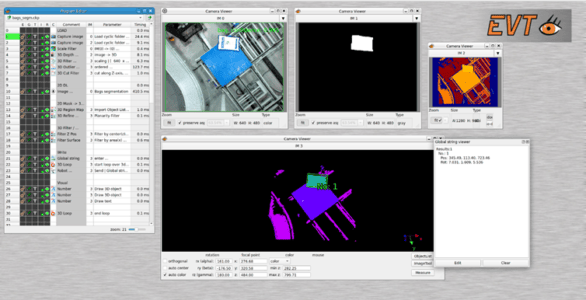
- EyeVision 3D: Depth cameras and laser-based systems integrated with the EyeVision software provide precise information about the position and size of the objects to assist the robot in its movement.
- AI & deep learning : The basis is the new recognition based on deep learning. Once the objects have been recognized using deep learning, the gripping positions and angles are determined in the 3D image. The point cloud is then used to determine which of the objects is in the top position and depalletizing begins. The neural networks predefined in EyeVision allow this procedure for a large number of objects. If an object is not yet known, it can be quickly taught using the integrated learning tool so that these objects can also be reliably recognized.
Areas of application
- Logistics and warehousing: Robots that palletize and depalletize are widely used in warehouses and distribution centers to automate the flow of materials.
- Food industry: Here, particular attention is paid to speed and hygiene, as many goods (such as packaged food) have to be moved in bulk.
- Pharmaceutical industry: Depalletizing of medicines or sensitive products is particularly precise here in order to avoid damage.