EVT at the Control 2024
Experience the Future of Robot Vision at Control!
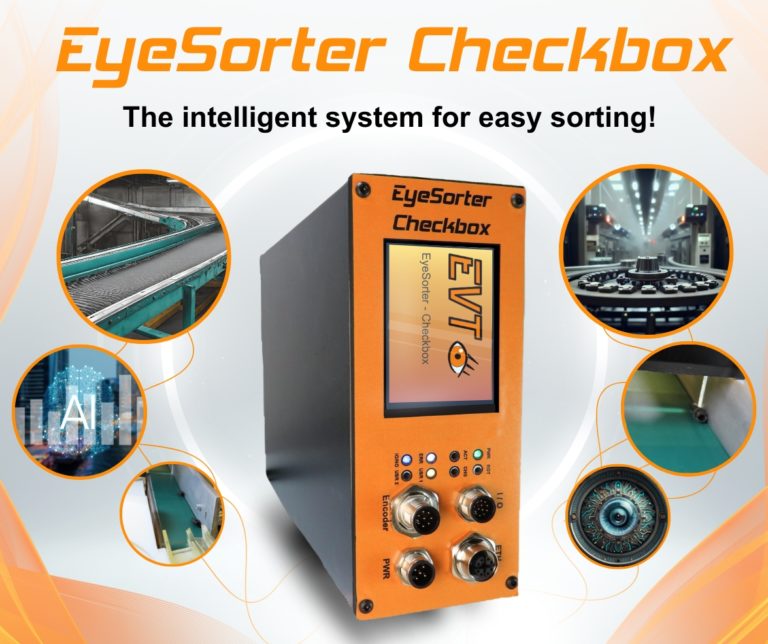
EyeSorter Checkbox
The smart solution for complex sorting tasks!
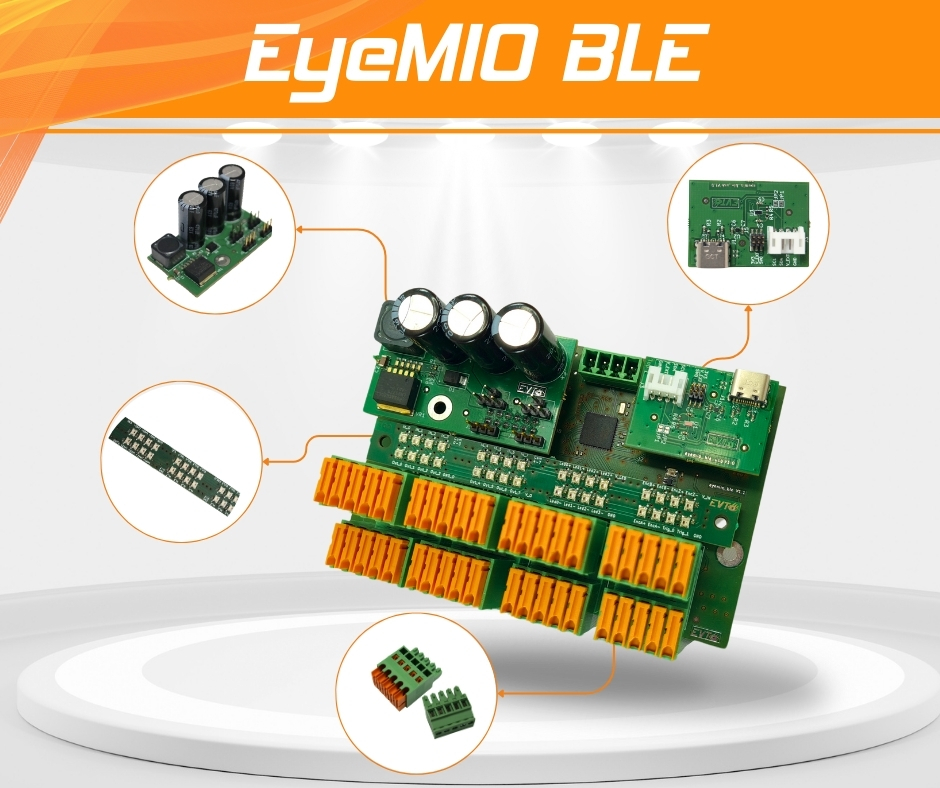
The new EyeMIO
EVT presents the newly revised EyeMIO-v2!

Robot Vision
Watch our newest Video about Robot Vision!